
April 25, 2024 | 9:00 EDT / 15:00 CEST / 22:00 JST » View Recording
Speaker: Dan Negrut, NVIDIA CUDA Fellow, Bernard A. and Frances M. Weideman Professor of Mechanical Engineering, Simulation-Based Engineering Lab, University of Wisconsin-Madison

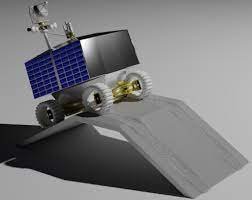
Lunar rover simulation in Project Chrono
Our lab has worked on several projects aimed at improving the mobility of autonomous rovers operating in lunar conditions. The design of such rovers increasingly relies on computer simulation. One of the more challenging tasks is producing terramechanics models that enable the simulator to accurately capture wheel slip and potential sinkage. Another challenge is sensing high slip and sinkage to adequately control the vehicle and maintain its ability to traverse the terrain. In this context, the talk will cover two main topics: it presents an overview of terramechanics models in robotics, and it briefly describes the sensing used in lunar mobility simulations. The latter aspect involves simulating camera operations on the Moon for the autonomy stack design. The quality of the camera's synthetic images is critical, as they inform the perception stage, which in turn, influences the planning and control stages of the autonomy stack.
Keywords: modeling, terramechanics, computer simulation, robotics, lunar rover, smoothed particle hydrodynamics, GPU computing

Dan Negrut
Dan Negrut received his Mechanical Engineering Ph.D. in 1998 from the University of Iowa. He spent six years working as a software developer in Ann Arbor, Michigan. In 2004 he served as an Adjunct Assistant Professor in the Department of Mathematics at the University of Michigan, Ann Arbor. He spent 2005 as a Visiting Scientist at Argonne National Laboratory in the Mathematics and Computer Science Division. At the end of 2005 Dan joined the Mechanical Engineering faculty at the University of Wisconsin-Madison. His interests are in Computational Science, and he co-leads the Simulation-Based Engineering Lab (http://sbel.wisc.edu). Lab sponsors include National Science Foundation, NASA, US Army Research Office, Department of Transportation, Department of Energy, and several industry partners such as Hexagon, Komatsu, and Wind River. The lab’s projects focus on simulation-in-robotics, terramechanics, high performance computing, computational dynamics, fluid-solid interaction, computer vision, computer graphics. Dan received a National Science Foundation Career Award in 2009. Since 2010 he has been an NVIDIA CUDA Fellow. He is one of the technical leads of Project Chrono, an open-source multi-physics simulation platform (http://www.projectchrono.org/). Chrono is used in real-life projects such as NASA’s VIPER design and the Artemis mission.
ISTVS has been hosting online events for research on terramechanics and terrain-vehicle systems under our Digital Event Series since 2021. Recordings from the series are posted to our YouTube channel. Make sure you’re subscribed to the ISTVS Newswire to keep up on upcoming events.
