ISTVS Digital Event Series 2024

ISTVS Digital Event Series
We welcome you to a digital event series of terramechanics bites by established researchers and student-led research seminars. Series playlist » YouTube
U P C O M I N G E V E N T S
To be announced
P A S T E V E N T S

VEHICLE DYNAMICS GROUP, UNIVERSITY OF PRETORIA, SA
Off-road vehicles require high ground clearance, long suspension travel, and soft suspension to maintain traction and comfort on rough, soft terrain. However, these same features can reduce handling performance and rollover stability at higher speeds on smoother surfaces. Balancing these trade-offs requires a strong understanding of tire–terrain interaction, vehicle dynamics, and chassis control systems.
The session will conclude with updates on the 56th ISTVS Conference (October 11–15, 2026, Pretoria, South Africa) and the ISTVS Student Competition.

NEVADA AUTOMOTIVE TEST CENTER (NATC)
Nevada Automotive Test Center (NATC) is a recognized leader in developmental and production tire testing for both commercial and military vehicle platforms, supported by a dedicated tire testing division. A long-time supporter of the ISTVS conference, NATC will present a talk focused on the critical mobility factors that influence ground vehicle performance. NATC website: https://natc-ht.com/

MISSISSIPPI STATE UNIVERSITY
This talk will present simulations for vehicle mobility in deformable soils using Discrete Element Method (DEM) performed at the Center for Advanced Vehicular Systems, Mississippi State University. Results of the DEM simulations using coarse-scale DEM soil models to predict tractive performance of a wheel in deformable soils will be shown and compared with published experimental data and empirical relationships.
UNIVERSITY OF CAMBRIDGE
Terramechanics and geomechanics are rarely considered early career paths. This talk traces the speaker’s journey from structural engineering to terramechanics, highlighting connections between fields and key project insights. It also details the path to securing an NSF CAREER Award and offers guidance for aspiring engineers and researchers. Terramechanics, focused on terrain–machine interaction, is vital for advancing autonomous systems in construction, mining, agriculture, and mobility.

MOBILITY SYSTEMS BRANCH, ERDC, U.S. ARMY CORPS OF ENGINEERS
This talk will discuss the importance of sensors to autonomous ground vehicle mobility and some of the challenges involved in accurately modeling these sensors to provide useful data in modeling and simulation tools.

SOIL MACHINE DYNAMIC LABORATORY, IOWA STATE UNIVERSITY
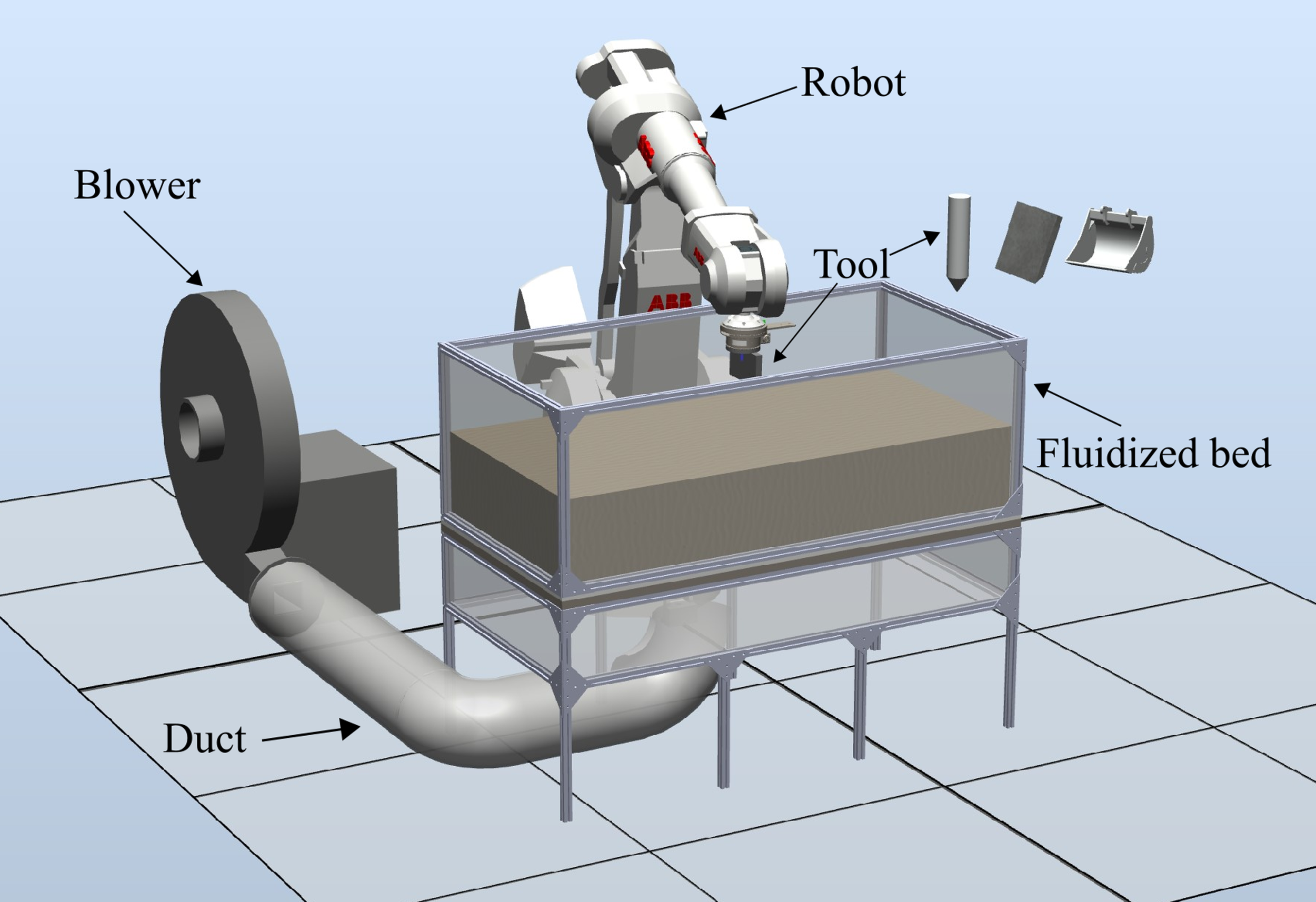
This talk focuses on the virtual performance analysis of bulldozer blades and subsoilers to optimize design, train AI, and advance automation for earth-moving vehicles. It integrates high-fidelity elasto-plastic cohesive DEM soil models, similitude scaling, and validation experiments to predict energy and dynamic soil interactions. This approach supports digital twin development, enhances electric-powered off-road vehicle design, and accelerates AI-driven automation in earth-moving operations.

This talk will explore how the U.S. Army Engineer Research and Development Center - ERDC (previously known as WES) approaches mobility for ground vehicles operating in adverse conditions. In particular, this presentation talks about mobility research on soft soils and cold regions from Dr. Brad Hansen and Mr. Michael Parker

Zeinab El-Sayegh, PhD, PEng, Department of Automotive and Mechatronics Engineering, Ontario Tech University, will introduce the concept of virtual soil moisturization and its impact on the performance of 315/80R22.5-sized truck tires. The truck tires are simulated using multiple layers and materials in a Finite Element Analysis (FEA) environment. Moist sand, composed of layered water and sand particles, is simulated using the Smoothed-Particle Hydrodynamics (SPH) technique. The tire-sand interaction is defined by a hybrid FEA-SPH interaction model, and the tire's tractive performance—including tractive effort, motion resistance coefficient, and tire sinkage—will be presented.
Christopher Goodin, Ph.D., Center for Advanced Vehicular Systems, Mississippi State University, will introduce the MAVS and show some examples of how it is being used in the classroom as an instructional tool for autonomous vehicles, by graduate students for research, and by researchers around the world in a variety of military and commercial applications. The technical underpinnings of the MAVS will also be presented.

Dan Negrut, NVIDIA CUDA Fellow, Bernard A. and Frances M. Weideman Professor of Mechanical Engineering, Simulation-Based Engineering Lab, University of Wisconsin-Madison. Our lab has worked on several projects aimed at improving the mobility of autonomous rovers operating in lunar conditions. The design of such rovers increasingly relies on computer simulation. The talk will cover two main topics: it presents an overview of terramechanics models in robotics, and it briefly describes the sensing used in lunar mobility simulations.

Mohit Nitin Shenvi, Ph.D., Terramechanics, Multibody, and Vehicle Systems Laboratory, Virginia Tech: This talk focuses on the literature of snow characterization and on an analysis performed to identify the extent to which testing conditions affect the traction coefficient of tires using the ASTM 14-inch Standard Reference Test Tire (SRTT) on snow. Another area of focus will be the performance evaluation of an custom in-house device against the Clegg impact hammer and CTI penetrometer when employed in the field for measurements on a compacted snow test track at the Smithers Winter Test Center.

Paweł Tomiło, Ph.D., Lublin University of Technology. The session will introduce the hybrid-locomotion rover concept. The design of a hybrid robot combines the characteristics of wheeled and legged robots. The rover is equipped with a crawling mechanism that will allow it to climb steep slopes areas where a wheeled vehicle could slip due to loose ground. The concept of the rover will be discussed, the current state of research, and future work on the development of the rover will be presented.

RECORDING | TERRABITE — The 11th Asia-Pacific Regional Conference of the ISTVS was held online in September 2022, hosted by the Harbin Institute of Technology, PR China, and included presenters from around the world. The Conference Committee identified papers whose authors were encouraged to submit manuscripts for a Special Issue of the Society’s Journal of Terramechanics. The Special Issue that resulted represents a selection of the best papers of the conference: Best Papers of 11th Asia-Pacific Regional Conference of the ISTVS. ISTVS has been hosting online events for ongoing and recent research on terramechanics and terrain-vehicle systems under our Digital Event Series since 2021. Recordings from the series are posted to our YouTube channel. Please join us in two upcoming sessions dedicated to the best papers from this Special Issue. This first session is on February 1.

RECORDING | TERRABITE — We are delighted to announce that Dr. Herman Hamersma will be joining us for an ISTVS Digital Event to discuss his work on Off-road advanced driver assist systems in the South African mining industry.

RECORDING | TERRABITE — We are delighted to announce that Dr. Ole Balling will be joining us for an ISTVS Digital Event to discuss his work on NG-NRMM: Next-Generation NATO Reference Mobility Model.

RECORDING | TERRABITE — We welcome Vladimir V. Vantsevich and David J. Gorsich, the Editors-in-Chief of the ISTVS Journal of Terramechanics for a special event on Autonomous Terrain-Mobility Performance Optimization: Fundamentals for Unmanned Ground Vehicles.

RECORDING | TERRABITE — The editors of the upcoming Journal of Terramechanics Special Issue on Soil Modeling and Simulation for Terramechanics Applications of Manned and Unmanned Autonomous Vehicles will discuss the topics of this special issue, invite authors to submit to the special issue, and open for questions for further discussion with the attendees. The proposed open-for-paper submission date will be June 2023.

RECORDING | TERRABITE — Chris Mason, CEO, will join us to detail the rich history of FISITA, its modernization program, and how it is fit for purpose as a membership organization of the future. ISTVS is an affiliate of FISITA and we are pleased to host Chris for this talk about modern membership organizations in technical and engineering domains. We also talk about the FISITA World Congress in Barcelona in September, the ISTVS presence at the congress, and how ISTVS members can get involved.

RECORDING | STUDENT RESEARCH SEMINAR — Traversing granular regolith, especially in reduced gravity environments, remains a potential challenge for wheeled rovers. Mitigating hazards for planetary exploration rovers requires testing in representative environments, but direct Earth-based testing fails to account for the effect of reduced gravity on the soil itself. The talk considers experimental approaches, and results from recent on-ground experiments evaluating the granular scaling laws in a cohesive lunar soil simulant are presented. Additionally, application of granular scaling laws to testing potential future lunar rovers under development by NASA's Jet Propulsion Laboratory is demonstrated. Finally, guidelines for conducting and interpreting 1-g mobility tests for lunar rovers are outlined.
VIEW RECORDING | In this ISTVS Student Research Seminar, we welcome five graduate student researchers connected to the organizing committee of this year’s 11th Asia-Pacific Regional Conference of the ISTVS to talk about their research. Topics include: granular dynamics, intelligent control of wheeled mobile robots, the design of metal flexible wheels for the pressurized lunar rover, terrain classification, terrain mechanical properties sensing, terramechanical mapping, navigation for planetary rovers, wheel soil interaction model, soil bin test, the coupling simulation of FEM and DEM, robot manipulation, including imitation learning, convex optimization, multi-objective optimization, combination of learning with control, the unified contact parameters definition to describe the multi-modal robot-terrain interaction, and motion uncertainty calculations for hybrid robot path planning.

Carl Becker, Ph.D., Vehicle Dynamics Group, University of Pretoria. Carl Becker’s work looks at the importance of using artificial terrain in a laboratory environment that is representative of in-field terrains to characterize tyres and the effect of tyre wear. The presentation will cover the doctoral work Carl did to investigate changes in tyre characteristics with tyre wear, terrain interaction, and terrain characteristics of large lug tyres.

Theunis Botha, Ph.D., Senior Lecturer, Vehicle Dynamics Group, University of Pretoria. The presentation will present camera-based measurement techniques developed at the University of Pretoria’s Vehicle Dynamics Group. The methods allow useful measurements to be obtained for vehicle research with the presentation focused on off-road terrain and vehicles.

Dr. Peter Kiss, Professor of Biosystems Engineering, Hungarian University of Agriculture and Life Science. Dr. Peter Kiss and Ph.D. candidate Nihal Salman discuss a state-of-the-art on load-bearing capacity of soil as a homogeneous finite half-space and ongoing research in terramechanics and land locomotion.

Dr. Paul Ayers, ISTVS Fellow, Biosystems Engineering Professor Emeritus, University of Tennessee. The Next Generation NATO Reference Mobility Model (NG-NRMM) provides an opportunity for the utilization of physics-based Vehicle Terrain Interaction models. This presentation provides the framework for possible vehicle-soil interaction components to assist model development. The physics-based components include tire placement, surface loading, stress distribution, time-dependent soil compression (multi-pass), preconsolidation stresses, soil rebound, lateral displacement, slip sinkage, and soil bulldozing.

Dr. George Mason, ISTVS Fellow, Center for Advanced Vehicle Systems, Mississippi State University. A general discussion of the uses of mapping and geographical information systems (GIS) to build an off-road simulation environment. We present the typical input data fields for models such as the NATO Reference Mobility Model (NRMM) and websites that contain information useful in defining the attributes. We discuss some of the temporal and spatial issues and future work in GIS.
David Jelinek, Undergraduate Researcher, Center for Advanced Vehicle Systems, Mississippi State University. This presentation will overview the expansion of the DROVE dataset (database records for off-road vehicle environments) with fine-grained soil wheel test data. Contributed data originates from field/laboratory tests characterizing the tractive performance of wheels operating in dry sands. The overview extends from measurement acquisition to the digitization process and current applications. Variables measured during each test include the soil’s cone index, vertical load, and the wheel’s dimensions, torque, drawbar pull, motion resistance, sinkage, and slip.